水下机器人中的各类传感器应用及未来市场预测
水下机器人也称作水下航行器或无人潜水器,是一种可利用净浮力和姿态角调整获得推进力,以在水下移动,具有视觉和感知系统,通过遥控或自主操作方式使用机械手包括其他工具,代替或辅助人去完成某些水下作业的装置。
水下机器人通常分为载人潜水器(HOV)、遥控水下机器人(ROV)和自主水下机器人(AUV)三种类型。目前,水下机器人可用于海底测绘、水产养殖、环境监控、管道检查、资源勘探、海关缉私等等,应用领域非常广泛。
目前,水下机器人在作业过程中,通常需要通过自动控制系统和通讯系统对其运动进行控制和调节,使其能够到达正确的作业地点。而要保证机器人能够顺利到达目的地,就必须对水下位置加以监控和调节。
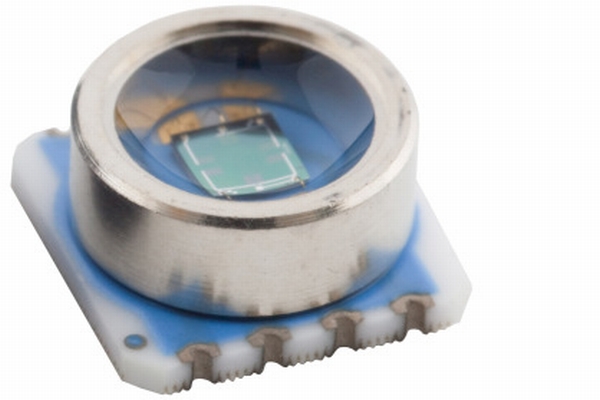
其中,机器人的声纳可以用来探测障碍物和靠近的物体,避免水下航行过程中发生碰撞。GPS定位系统是用来测量水下机器人的实时坐标位置,电子罗盘则可以对机器人的方位航行进行测量,并将自身航向发送给控制系统,以便同目的地方位进行比较,并作出相应的航行调整。尤其是远程作业时,航向的测量就更加重要。

在水下机器人应用方面,目前,除了在水产养殖,船体码头巡检,水库大坝巡检和市政管道巡检等B端领域的应用之外,水下机器人的在个人消费娱乐方向的应用场景也颇为丰富,如潜水摄影、游艇钓鱼、海岛旅游等。
研究报告显示,2020年,中国无人潜器的市场规模将达到800亿元人民币级别。其中,面向个人的“潜水伴侣”类无人潜器将拥有60亿元的市场空间。面对市场蓝海,水下机器人领域还存在着巨大的想象空间。
敬请关注更多传感器
上一篇:非接触测量位置传感器 | 下一篇:港珠澳大桥的开通,离不开这些桥梁健康监测
同类文章排行